DepthAnything と OpenVINO による深度推定¶
この Jupyter ノートブックはオンラインで起動でき、ブラウザーのウィンドウで対話型環境を開きます。ローカルにインストールすることもできます。次のオプションのいずれかを選択します。



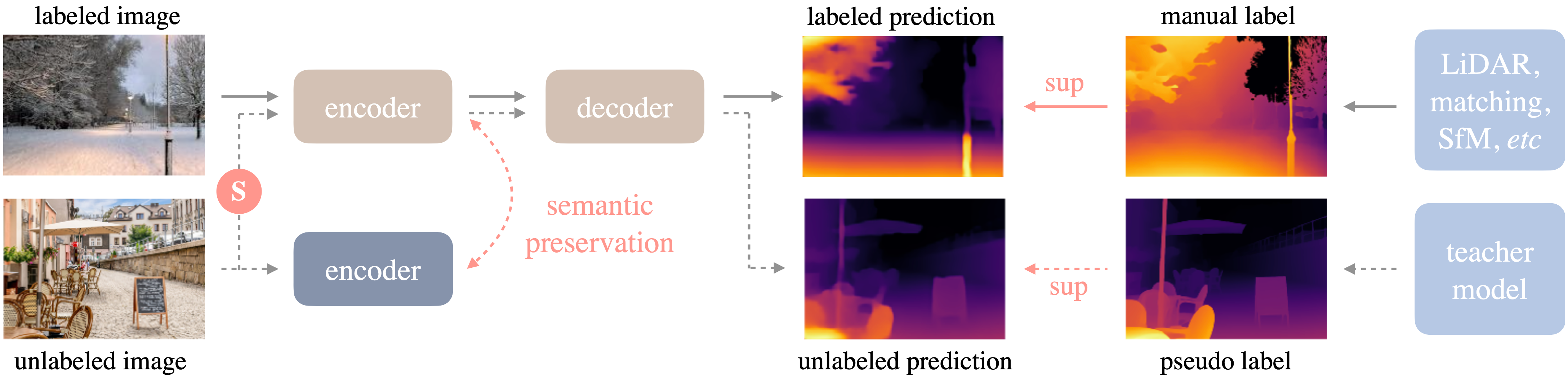
Depth Anything は、堅牢な単眼奥行き推定のための非常に実用的なソリューションです。このプロジェクトは、新しい技術モジュールを追求することなく、あらゆる状況下であらゆる画像を扱うシンプルかつ強力な基盤モデルを構築することを目的としています。Depth Anything のフレームワークを以下に示します。 標準のパイプラインを採用して、大規模なラベルなし画像の力を解き放ちます。
モデルの詳細については、プロジェクトのウェブページ、論文、公式リポジトリーを参照してください。
このチュートリアルでは、OpenVINO を使用して DepthAnything を変換して実行する方法を検討します。
目次¶
必要条件¶
from pathlib import Path
repo_dir = Path("Depth-Anything")
if not repo_dir.exists():
!git clone https://github.com/LiheYoung/Depth-Anything
%cd Depth-Anything
%pip install -q "openvino>=2023.3.0"
%pip install -q "typing-extensions>=4.9.0" eval-type-backport
%pip install -q "gradio-imageslider<0.0.18"; python_version <= "3.9"
%pip install -q -r requirements.txt --extra-index-url https://download.pytorch.org/whl/cpu
Cloning into 'Depth-Anything'...
remote: Enumerating objects: 406, done.[K
remote: Counting objects: 0% (1/141)[K
remote: Counting objects: 1% (2/141)[K
remote: Counting objects: 2% (3/141)[K
remote: Counting objects: 3% (5/141)[K
remote: Counting objects: 4% (6/141)[K
remote: Counting objects: 5% (8/141)[K
remote: Counting objects: 6% (9/141)[K
remote: Counting objects: 7% (10/141)[K
remote: Counting objects: 8% (12/141)[K
remote: Counting objects: 9% (13/141)[K
remote: Counting objects: 10% (15/141)[K
remote: Counting objects: 11% (16/141)[K
remote: Counting objects: 12% (17/141)[K
remote: Counting objects: 13% (19/141)[K
remote: Counting objects: 14% (20/141)[K
remote: Counting objects: 15% (22/141)[K
remote: Counting objects: 16% (23/141)[K
remote: Counting objects: 17% (24/141)[K
remote: Counting objects: 18% (26/141)[K
remote: Counting objects: 19% (27/141)[K
remote: Counting objects: 20% (29/141)[K
remote: Counting objects: 21% (30/141)[K
remote: Counting objects: 22% (32/141)[K
remote: Counting objects: 23% (33/141)[K
remote: Counting objects: 24% (34/141)[K
remote: Counting objects: 25% (36/141)[K
remote: Counting objects: 26% (37/141)[K
remote: Counting objects: 27% (39/141)[K
remote: Counting objects: 28% (40/141)[K
remote: Counting objects: 29% (41/141)[K
remote: Counting objects: 30% (43/141)[K
remote: Counting objects: 31% (44/141)[K
remote: Counting objects: 32% (46/141)[K
remote: Counting objects: 33% (47/141)[K
remote: Counting objects: 34% (48/141)[K
remote: Counting objects: 35% (50/141)[K
remote: Counting objects: 36% (51/141)[K
remote: Counting objects: 37% (53/141)[K
remote: Counting objects: 38% (54/141)[K
remote: Counting objects: 39% (55/141)[K
remote: Counting objects: 40% (57/141)[K
remote: Counting objects: 41% (58/141)[K
remote: Counting objects: 42% (60/141)[K
remote: Counting objects: 43% (61/141)[K
remote: Counting objects: 44% (63/141)[K
remote: Counting objects: 45% (64/141)[K
remote: Counting objects: 46% (65/141)[K
remote: Counting objects: 47% (67/141)[K
remote: Counting objects: 48% (68/141)[K
remote: Counting objects: 49% (70/141)[K
remote: Counting objects: 50% (71/141)[K
remote: Counting objects: 51% (72/141)[K
remote: Counting objects: 52% (74/141)[K
remote: Counting objects: 53% (75/141)[K
remote: Counting objects: 54% (77/141)[K
remote: Counting objects: 55% (78/141)[K
remote: Counting objects: 56% (79/141)[K
remote: Counting objects: 57% (81/141)[K
remote: Counting objects: 58% (82/141)[K
remote: Counting objects: 59% (84/141)[K
remote: Counting objects: 60% (85/141)[K
remote: Counting objects: 61% (87/141)[K
remote: Counting objects: 62% (88/141)[K
remote: Counting objects: 63% (89/141)[K
remote: Counting objects: 64% (91/141)[K
remote: Counting objects: 65% (92/141)[K
remote: Counting objects: 66% (94/141)[K
remote: Counting objects: 67% (95/141)[K
remote: Counting objects: 68% (96/141)[K
remote: Counting objects: 69% (98/141)[K
remote: Counting objects: 70% (99/141)[K
remote: Counting objects: 71% (101/141)[K
remote: Counting objects: 72% (102/141)[K
remote: Counting objects: 73% (103/141)[K
remote: Counting objects: 74% (105/141)[K
remote: Counting objects: 75% (106/141)[K
remote: Counting objects: 76% (108/141)[K
remote: Counting objects: 77% (109/141)[K
remote: Counting objects: 78% (110/141)[K
remote: Counting objects: 79% (112/141)[K
remote: Counting objects: 80% (113/141)[K
remote: Counting objects: 81% (115/141)[K
remote: Counting objects: 82% (116/141)[K
remote: Counting objects: 83% (118/141)[K
remote: Counting objects: 84% (119/141)[K
remote: Counting objects: 85% (120/141)[K
remote: Counting objects: 86% (122/141)[K
remote: Counting objects: 87% (123/141)[K
remote: Counting objects: 88% (125/141)[K
remote: Counting objects: 89% (126/141)[K
remote: Counting objects: 90% (127/141)[K
remote: Counting objects: 91% (129/141)[K
remote: Counting objects: 92% (130/141)[K
remote: Counting objects: 93% (132/141)[K
remote: Counting objects: 94% (133/141)[K
remote: Counting objects: 95% (134/141)[K
remote: Counting objects: 96% (136/141)[K
remote: Counting objects: 97% (137/141)[K
remote: Counting objects: 98% (139/141)[K
remote: Counting objects: 99% (140/141)[K
remote: Counting objects: 100% (141/141)[K
remote: Counting objects: 100% (141/141), done.[K
remote: Compressing objects: 0% (1/115)[K
remote: Compressing objects: 1% (2/115)[K
remote: Compressing objects: 2% (3/115)[K
remote: Compressing objects: 3% (4/115)[K
remote: Compressing objects: 4% (5/115)[K
remote: Compressing objects: 5% (6/115)[K
remote: Compressing objects: 6% (7/115)[K
remote: Compressing objects: 7% (9/115)[K
remote: Compressing objects: 8% (10/115)[K
remote: Compressing objects: 9% (11/115)[K
remote: Compressing objects: 10% (12/115)[K
remote: Compressing objects: 11% (13/115)[K
remote: Compressing objects: 12% (14/115)[K
remote: Compressing objects: 13% (15/115)[K
remote: Compressing objects: 14% (17/115)[K
remote: Compressing objects: 15% (18/115)[K
remote: Compressing objects: 16% (19/115)[K
remote: Compressing objects: 17% (20/115)[K
remote: Compressing objects: 18% (21/115)[K
remote: Compressing objects: 19% (22/115)[K
remote: Compressing objects: 20% (23/115)[K
remote: Compressing objects: 21% (25/115)[K
remote: Compressing objects: 22% (26/115)[K
remote: Compressing objects: 23% (27/115)[K
remote: Compressing objects: 24% (28/115)[K
remote: Compressing objects: 25% (29/115)[K
remote: Compressing objects: 26% (30/115)[K
remote: Compressing objects: 27% (32/115)[K
remote: Compressing objects: 28% (33/115)[K
remote: Compressing objects: 29% (34/115)[K
remote: Compressing objects: 30% (35/115)[K
remote: Compressing objects: 31% (36/115)[K
remote: Compressing objects: 32% (37/115)[K
remote: Compressing objects: 33% (38/115)[K
remote: Compressing objects: 34% (40/115)[K
remote: Compressing objects: 35% (41/115)[K
remote: Compressing objects: 36% (42/115)[K
remote: Compressing objects: 37% (43/115)[K
remote: Compressing objects: 38% (44/115)[K
remote: Compressing objects: 39% (45/115)[K
remote: Compressing objects: 40% (46/115)[K
remote: Compressing objects: 41% (48/115)[K
remote: Compressing objects: 42% (49/115)[K
remote: Compressing objects: 43% (50/115)[K
remote: Compressing objects: 44% (51/115)[K
remote: Compressing objects: 45% (52/115)[K
remote: Compressing objects: 46% (53/115)[K
remote: Compressing objects: 47% (55/115)[K
remote: Compressing objects: 48% (56/115)[K
remote: Compressing objects: 49% (57/115)[K
remote: Compressing objects: 50% (58/115)[K
remote: Compressing objects: 51% (59/115)[K
remote: Compressing objects: 52% (60/115)[K
remote: Compressing objects: 53% (61/115)[K
remote: Compressing objects: 54% (63/115)[K
remote: Compressing objects: 55% (64/115)[K
remote: Compressing objects: 56% (65/115)[K
remote: Compressing objects: 57% (66/115)[K
remote: Compressing objects: 58% (67/115)[K
remote: Compressing objects: 59% (68/115)[K
remote: Compressing objects: 60% (69/115)[K
remote: Compressing objects: 61% (71/115)[K
remote: Compressing objects: 62% (72/115)[K
remote: Compressing objects: 63% (73/115)[K
remote: Compressing objects: 64% (74/115)[K
remote: Compressing objects: 65% (75/115)[K
remote: Compressing objects: 66% (76/115)[K
remote: Compressing objects: 67% (78/115)[K
remote: Compressing objects: 68% (79/115)[K
remote: Compressing objects: 69% (80/115)[K
remote: Compressing objects: 70% (81/115)[K
remote: Compressing objects: 71% (82/115)[K
remote: Compressing objects: 72% (83/115)[K
remote: Compressing objects: 73% (84/115)[K
remote: Compressing objects: 74% (86/115)[K
remote: Compressing objects: 75% (87/115)[K
remote: Compressing objects: 76% (88/115)[K
remote: Compressing objects: 77% (89/115)[K
remote: Compressing objects: 78% (90/115)[K
remote: Compressing objects: 79% (91/115)[K
remote: Compressing objects: 80% (92/115)[K
remote: Compressing objects: 81% (94/115)[K
remote: Compressing objects: 82% (95/115)[K
remote: Compressing objects: 83% (96/115)[K
remote: Compressing objects: 84% (97/115)[K
remote: Compressing objects: 85% (98/115)[K
remote: Compressing objects: 86% (99/115)[K
remote: Compressing objects: 87% (101/115)[K
remote: Compressing objects: 88% (102/115)[K
remote: Compressing objects: 89% (103/115)[K
remote: Compressing objects: 90% (104/115)[K
remote: Compressing objects: 91% (105/115)[K
remote: Compressing objects: 92% (106/115)[K
remote: Compressing objects: 93% (107/115)[K
remote: Compressing objects: 94% (109/115)[K
remote: Compressing objects: 95% (110/115)[K
remote: Compressing objects: 96% (111/115)[K
remote: Compressing objects: 97% (112/115)[K
remote: Compressing objects: 98% (113/115)[K
remote: Compressing objects: 99% (114/115)[K
remote: Compressing objects: 100% (115/115)[K
remote: Compressing objects: 100% (115/115), done.[K
Receiving objects: 0% (1/406)
Receiving objects: 0% (2/406), 3.58 MiB | 3.49 MiB/s
Receiving objects: 0% (3/406), 7.50 MiB | 3.64 MiB/s
Receiving objects: 0% (4/406), 10.91 MiB | 3.52 MiB/s
Receiving objects: 0% (4/406), 13.38 MiB | 3.25 MiB/s
Receiving objects: 0% (4/406), 16.37 MiB | 3.19 MiB/s
Receiving objects: 1% (5/406), 17.36 MiB | 2.98 MiB/s
Receiving objects: 2% (9/406), 17.36 MiB | 2.98 MiB/s
Receiving objects: 2% (11/406), 18.32 MiB | 2.78 MiB/s
Receiving objects: 2% (12/406), 19.92 MiB | 2.29 MiB/s
Receiving objects: 2% (12/406), 21.36 MiB | 2.07 MiB/s
Receiving objects: 2% (12/406), 22.94 MiB | 1.69 MiB/s
Receiving objects: 2% (12/406), 24.57 MiB | 1.59 MiB/s
Receiving objects: 3% (13/406), 24.57 MiB | 1.59 MiB/s
Receiving objects: 3% (14/406), 26.98 MiB | 1.78 MiB/s
Receiving objects: 3% (14/406), 29.75 MiB | 1.96 MiB/s
Receiving objects: 3% (14/406), 31.61 MiB | 2.12 MiB/s
Receiving objects: 3% (15/406), 33.66 MiB | 2.16 MiB/s
Receiving objects: 3% (15/406), 35.47 MiB | 2.21 MiB/s
Receiving objects: 3% (15/406), 38.89 MiB | 2.21 MiB/s
Receiving objects: 3% (16/406), 42.68 MiB | 2.66 MiB/s
Receiving objects: 4% (17/406), 44.61 MiB | 2.86 MiB/s
Receiving objects: 4% (17/406), 45.92 MiB | 2.91 MiB/s
Receiving objects: 4% (17/406), 49.71 MiB | 3.32 MiB/s
Receiving objects: 4% (18/406), 53.49 MiB | 3.63 MiB/s
Receiving objects: 4% (19/406), 56.21 MiB | 3.36 MiB/s
Receiving objects: 4% (19/406), 58.43 MiB | 3.01 MiB/s
Receiving objects: 5% (21/406), 58.43 MiB | 3.01 MiB/s
Receiving objects: 5% (21/406), 61.68 MiB | 3.02 MiB/s
Receiving objects: 5% (21/406), 64.04 MiB | 2.71 MiB/s
Receiving objects: 5% (22/406), 66.81 MiB | 2.63 MiB/s
Receiving objects: 5% (22/406), 69.60 MiB | 2.80 MiB/s
Receiving objects: 6% (25/406), 69.60 MiB | 2.80 MiB/s
Receiving objects: 7% (29/406), 69.60 MiB | 2.80 MiB/s
Receiving objects: 7% (29/406), 73.45 MiB | 2.89 MiB/s
Receiving objects: 7% (32/406), 77.25 MiB | 3.26 MiB/s
Receiving objects: 8% (33/406), 77.25 MiB | 3.26 MiB/s
Receiving objects: 8% (33/406), 81.05 MiB | 3.33 MiB/s
Receiving objects: 8% (34/406), 84.83 MiB | 3.75 MiB/s
Receiving objects: 8% (35/406), 86.69 MiB | 3.77 MiB/s
Receiving objects: 9% (37/406), 86.69 MiB | 3.77 MiB/s
Receiving objects: 10% (41/406), 86.69 MiB | 3.77 MiB/s
Receiving objects: 10% (44/406), 92.43 MiB | 3.78 MiB/s
Receiving objects: 11% (45/406), 94.27 MiB | 3.76 MiB/s
Receiving objects: 12% (49/406), 96.22 MiB | 3.77 MiB/s
Receiving objects: 13% (53/406), 96.22 MiB | 3.77 MiB/s
Receiving objects: 14% (57/406), 96.22 MiB | 3.77 MiB/s
Receiving objects: 15% (61/406), 96.22 MiB | 3.77 MiB/s
Receiving objects: 16% (65/406), 96.22 MiB | 3.77 MiB/s
Receiving objects: 17% (70/406), 96.22 MiB | 3.77 MiB/s
Receiving objects: 17% (73/406), 98.10 MiB | 3.74 MiB/s
Receiving objects: 18% (74/406), 98.10 MiB | 3.74 MiB/s
Receiving objects: 18% (74/406), 101.26 MiB | 3.58 MiB/s
Receiving objects: 19% (78/406), 103.22 MiB | 3.59 MiB/s
Receiving objects: 20% (82/406), 103.22 MiB | 3.59 MiB/s
Receiving objects: 21% (86/406), 103.22 MiB | 3.59 MiB/s
Receiving objects: 22% (90/406), 103.22 MiB | 3.59 MiB/s
Receiving objects: 22% (93/406), 105.18 MiB | 3.59 MiB/s
Receiving objects: 23% (94/406), 107.12 MiB | 3.59 MiB/s
Receiving objects: 24% (98/406), 107.12 MiB | 3.59 MiB/s
Receiving objects: 24% (100/406), 108.48 MiB | 3.44 MiB/s
Receiving objects: 24% (100/406), 111.05 MiB | 3.18 MiB/s
Receiving objects: 25% (102/406), 111.05 MiB | 3.18 MiB/s
Receiving objects: 26% (106/406), 111.05 MiB | 3.18 MiB/s
Receiving objects: 27% (110/406), 111.05 MiB | 3.18 MiB/s
Receiving objects: 28% (114/406), 111.05 MiB | 3.18 MiB/s
Receiving objects: 29% (118/406), 111.05 MiB | 3.18 MiB/s
Receiving objects: 30% (122/406), 112.33 MiB | 3.06 MiB/s
Receiving objects: 31% (126/406), 112.33 MiB | 3.06 MiB/s
Receiving objects: 31% (128/406), 113.19 MiB | 2.99 MiB/s
Receiving objects: 31% (129/406), 114.94 MiB | 2.96 MiB/s
Receiving objects: 32% (130/406), 114.94 MiB | 2.96 MiB/s
Receiving objects: 33% (134/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 34% (139/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 35% (143/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 36% (147/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 37% (151/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 38% (155/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 39% (159/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 40% (163/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 41% (167/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 42% (171/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 43% (175/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 44% (179/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 45% (183/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 46% (187/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 47% (191/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 48% (195/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 49% (199/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 50% (203/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 51% (208/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 52% (212/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 53% (216/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 54% (220/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 55% (224/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 56% (228/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 57% (232/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 58% (236/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 59% (240/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 60% (244/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 61% (248/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 62% (252/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 63% (256/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 64% (260/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 65% (264/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 66% (268/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 67% (273/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 68% (277/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 69% (281/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 70% (285/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 71% (289/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 72% (293/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 73% (297/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 74% (301/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 75% (305/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 76% (309/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 77% (313/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 78% (317/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 79% (321/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 80% (325/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 81% (329/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 82% (333/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 83% (337/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 84% (342/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 85% (346/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 86% (350/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 87% (354/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 88% (358/406), 116.81 MiB | 2.94 MiB/s
Receiving objects: 88% (360/406), 119.14 MiB | 2.62 MiB/s
Receiving objects: 88% (360/406), 122.64 MiB | 2.93 MiB/s
Receiving objects: 88% (360/406), 126.48 MiB | 3.11 MiB/s
Receiving objects: 88% (360/406), 129.00 MiB | 3.09 MiB/s
Receiving objects: 89% (362/406), 129.00 MiB | 3.09 MiB/s
Receiving objects: 89% (363/406), 132.79 MiB | 3.17 MiB/s
Receiving objects: 89% (363/406), 136.70 MiB | 3.48 MiB/s
Receiving objects: 89% (363/406), 139.84 MiB | 3.31 MiB/s
Receiving objects: 89% (363/406), 143.14 MiB | 3.39 MiB/s
Receiving objects: 89% (363/406), 146.93 MiB | 3.49 MiB/s
Receiving objects: 90% (366/406), 146.93 MiB | 3.49 MiB/s
Receiving objects: 90% (368/406), 150.72 MiB | 3.50 MiB/s
Receiving objects: 90% (368/406), 154.51 MiB | 3.50 MiB/s
Receiving objects: 91% (370/406), 154.51 MiB | 3.50 MiB/s
Receiving objects: 91% (373/406), 158.29 MiB | 3.77 MiB/s
Receiving objects: 91% (373/406), 162.08 MiB | 3.77 MiB/s
Receiving objects: 91% (373/406), 165.89 MiB | 3.77 MiB/s
Receiving objects: 91% (373/406), 169.69 MiB | 3.78 MiB/s
Receiving objects: 92% (374/406), 171.59 MiB | 3.78 MiB/s
Receiving objects: 92% (376/406), 177.27 MiB | 3.77 MiB/s
Receiving objects: 92% (376/406), 181.00 MiB | 3.76 MiB/s
Receiving objects: 92% (376/406), 184.79 MiB | 3.76 MiB/s
Receiving objects: 93% (378/406), 184.79 MiB | 3.76 MiB/s
Receiving objects: 94% (382/406), 186.74 MiB | 3.77 MiB/s
Receiving objects: 95% (386/406), 188.58 MiB | 3.76 MiB/s
Receiving objects: 95% (387/406), 192.37 MiB | 3.76 MiB/s
Receiving objects: 95% (388/406), 194.32 MiB | 3.76 MiB/s
Receiving objects: 95% (388/406), 200.04 MiB | 3.77 MiB/s
Receiving objects: 95% (388/406), 203.84 MiB | 3.77 MiB/s
Receiving objects: 95% (388/406), 207.62 MiB | 3.77 MiB/s
Receiving objects: 95% (388/406), 210.38 MiB | 3.54 MiB/s
Receiving objects: 96% (390/406), 210.38 MiB | 3.54 MiB/s
Receiving objects: 96% (393/406), 212.25 MiB | 3.51 MiB/s
Receiving objects: 97% (394/406), 212.25 MiB | 3.51 MiB/s
Receiving objects: 97% (394/406), 218.10 MiB | 3.54 MiB/s
Receiving objects: 97% (394/406), 221.87 MiB | 3.52 MiB/s
Receiving objects: 97% (394/406), 225.63 MiB | 3.52 MiB/s
Receiving objects: 97% (394/406), 229.47 MiB | 3.77 MiB/s
Receiving objects: 97% (394/406), 233.26 MiB | 3.76 MiB/s
Receiving objects: 97% (394/406), 235.18 MiB | 3.75 MiB/s
Receiving objects: 98% (398/406), 237.16 MiB | 3.78 MiB/s
remote: Total 406 (delta 72), reused 69 (delta 26), pack-reused 265[K
Receiving objects: 99% (402/406), 237.16 MiB | 3.78 MiB/s
Receiving objects: 100% (406/406), 237.16 MiB | 3.78 MiB/s
Receiving objects: 100% (406/406), 237.89 MiB | 3.23 MiB/s, done.
Resolving deltas: 0% (0/124)
Resolving deltas: 1% (2/124)
Resolving deltas: 2% (3/124)
Resolving deltas: 3% (4/124)
Resolving deltas: 4% (6/124)
Resolving deltas: 5% (7/124)
Resolving deltas: 7% (9/124)
Resolving deltas: 9% (12/124)
Resolving deltas: 13% (17/124)
Resolving deltas: 16% (20/124)
Resolving deltas: 19% (24/124)
Resolving deltas: 22% (28/124)
Resolving deltas: 25% (31/124)
Resolving deltas: 28% (35/124)
Resolving deltas: 31% (39/124)
Resolving deltas: 32% (40/124)
Resolving deltas: 36% (45/124)
Resolving deltas: 37% (46/124)
Resolving deltas: 39% (49/124)
Resolving deltas: 40% (50/124)
Resolving deltas: 41% (51/124)
Resolving deltas: 43% (54/124)
Resolving deltas: 58% (72/124)
Resolving deltas: 64% (80/124)
Resolving deltas: 68% (85/124)
Resolving deltas: 72% (90/124)
Resolving deltas: 75% (94/124)
Resolving deltas: 80% (100/124)
Resolving deltas: 81% (101/124)
Resolving deltas: 83% (103/124)
Resolving deltas: 84% (105/124)
Resolving deltas: 85% (106/124)
Resolving deltas: 86% (107/124)
Resolving deltas: 100% (124/124)
Resolving deltas: 100% (124/124), done.
/opt/home/k8sworker/ci-ai/cibuilds/ov-notebook/OVNotebookOps-609/.workspace/scm/ov-notebook/notebooks/280-depth-anything/Depth-Anything
DEPRECATION: pytorch-lightning 1.6.5 has a non-standard dependency specifier torch>=1.8.*. pip 24.1 will enforce this behaviour change. A possible replacement is to upgrade to a newer version of pytorch-lightning or contact the author to suggest that they release a version with a conforming dependency specifiers. Discussion can be found at https://github.com/pypa/pip/issues/12063
Note: you may need to restart the kernel to use updated packages.
DEPRECATION: pytorch-lightning 1.6.5 has a non-standard dependency specifier torch>=1.8.*. pip 24.1 will enforce this behaviour change. A possible replacement is to upgrade to a newer version of pytorch-lightning or contact the author to suggest that they release a version with a conforming dependency specifiers. Discussion can be found at https://github.com/pypa/pip/issues/12063
Note: you may need to restart the kernel to use updated packages.
DEPRECATION: pytorch-lightning 1.6.5 has a non-standard dependency specifier torch>=1.8.*. pip 24.1 will enforce this behaviour change. A possible replacement is to upgrade to a newer version of pytorch-lightning or contact the author to suggest that they release a version with a conforming dependency specifiers. Discussion can be found at https://github.com/pypa/pip/issues/12063
/bin/bash: =: No such file or directory
Note: you may need to restart the kernel to use updated packages.
DEPRECATION: pytorch-lightning 1.6.5 has a non-standard dependency specifier torch>=1.8.*. pip 24.1 will enforce this behaviour change. A possible replacement is to upgrade to a newer version of pytorch-lightning or contact the author to suggest that they release a version with a conforming dependency specifiers. Discussion can be found at https://github.com/pypa/pip/issues/12063
ERROR: pip's dependency resolver does not currently take into account all the packages that are installed. This behaviour is the source of the following dependency conflicts.
pyannote-audio 2.0.1 requires torchaudio<1.0,>=0.10, but you have torchaudio 2.2.0+cpu which is incompatible.
tokenizers 0.14.1 requires huggingface_hub<0.18,>=0.16.4, but you have huggingface-hub 0.20.3 which is incompatible.
Note: you may need to restart the kernel to use updated packages.
PyTorch モデルをロードして実行¶
CPU 上で PyTorch モデルを実行できるようにするには、xformers アテンションの最適化を無効にする必要があります。
attention_file_path = Path("./torchhub/facebookresearch_dinov2_main/dinov2/layers/attention.py")
orig_attention_path = attention_file_path.parent / ("orig_" + attention_file_path.name)
if not orig_attention_path.exists():
attention_file_path.rename(orig_attention_path)
with orig_attention_path.open("r") as f:
data = f.read()
data = data.replace("XFORMERS_AVAILABLE = True", "XFORMERS_AVAILABLE = False")
with attention_file_path.open("w") as out_f:
out_f.write(data)
DepthAnything.from_pretrained メソッドは、PyTorch モデル・クラス・インスタンスを作成し、モデルの重みを読み込みます。リポジトリーには、VIT エンコーダーのサイズに応じて 3 つの利用可能なモデルがあります。
- Depth-Anything-ViT-Small (24.8M)
- Depth-Anything-ViT-Base (97.5M)
- Depth-Anything-ViT-Large (335.3M)
Depth-Anything-ViT-Small を使用しますが、モデルを実行して OpenVINO に変換する手順は、DepthAnything ファミリーの他のモデルにも適用できます。
from depth_anything.dpt import DepthAnything
encoder = 'vits' # can also be 'vitb' or 'vitl'
model_id = 'depth_anything_{:}14'.format(encoder)
depth_anything = DepthAnything.from_pretrained(f'LiheYoung/{model_id}')
xFormers not available
xFormers not available
入力データを準備¶
import urllib.request
from PIL import Image
urllib.request.urlretrieve(
url='https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/main/notebooks/utils/notebook_utils.py',
filename='notebook_utils.py'
)
from notebook_utils import download_file
download_file("https://github.com/openvinotoolkit/openvino_notebooks/assets/29454499/3f779fc1-c1b2-4dec-915a-64dae510a2bb", "furseal.png")
Image.open("furseal.png").resize((600, 400))
furseal.png: 0%| | 0.00/2.55M [00:00<?, ?B/s]

利用を簡単にするために、モデル作成者は入力画像を前処理するためのヘルパー関数を提供しています。主な条件は、画像サイズが 14 (vit patch サイズ) で割り切れ、[0, 1] の範囲で正規化されていることです。
from depth_anything.util.transform import Resize, NormalizeImage, PrepareForNet
from torchvision.transforms import Compose
import cv2
import torch
transform = Compose([
Resize(
width=518,
height=518,
resize_target=False,
ensure_multiple_of=14,
resize_method='lower_bound',
image_interpolation_method=cv2.INTER_CUBIC,
),
NormalizeImage(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
PrepareForNet(),
])
image = cv2.cvtColor(cv2.imread('furseal.png'), cv2.COLOR_BGR2RGB) / 255.0
h, w = image.shape[:-1]
image = transform({'image': image})['image']
image = torch.from_numpy(image).unsqueeze(0)
モデルの推論を実行¶
前処理された画像がモデルに渡され、モデルは B x H x W 形式の深度マップを返します。ここで、B は入力バッチサイズ、H は前処理された画像の高さ、W は前処理された画像の幅です。
# depth shape: 1xHxW
depth = depth_anything(image)
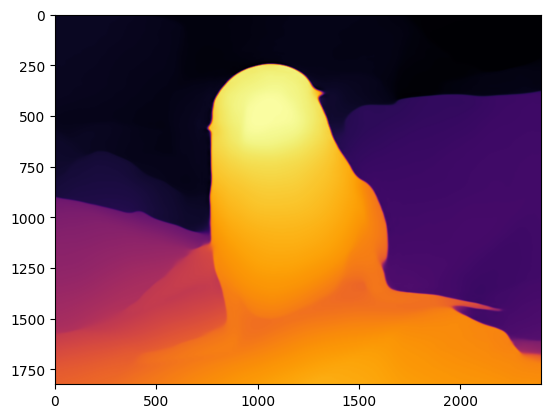
画像処理が完了したら、深度マップを元の画像サイズに変更し、視覚化の準備ができます。
import torch.nn.functional as F
import numpy as np
depth = F.interpolate(depth[None], (h, w), mode='bilinear', align_corners=False)[0, 0]
depth = (depth - depth.min()) / (depth.max() - depth.min()) * 255.0
depth = depth.cpu().detach().numpy().astype(np.uint8)
depth_color = cv2.applyColorMap(depth, cv2.COLORMAP_INFERNO)
from matplotlib import pyplot as plt
plt.imshow(depth_color[:, :, ::-1]);
モデルを OpenVINO IR 形式に変換¶
OpenVINO は、OpenVINO 中間表現 (IR) への変換により PyTorch モデルをサポートします。これらの目的には、OpenVINO モデル変換 API を使用する必要があります。ov.convert_model 関数は、元の PyTorch モデル・インスタンスとトレース用のサンプル入力を受け取り、OpenVINO フレームワークでこのモデルを表す ov.Model を返します。変換されたモデルは、ov.save_model 関数を使用してディスクに保存するか、core.complie_model を使用してデバイスに直接ロードできます。
import openvino as ov
OV_DEPTH_ANYTHING_PATH = Path(f'{model_id}.xml')
if not OV_DEPTH_ANYTHING_PATH.exists():
ov_model = ov.convert_model(depth_anything, example_input=image, input=[1, 3, 518, 518])
ov.save_model(ov_model, OV_DEPTH_ANYTHING_PATH)
/opt/home/k8sworker/ci-ai/cibuilds/ov-notebook/OVNotebookOps-609/.workspace/scm/ov-notebook/notebooks/280-depth-anything/Depth-Anything/torchhub/facebookresearch_dinov2_main/dinov2/layers/patch_embed.py:73: TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
assert H % patch_H == 0, f"Input image height {H} is not a multiple of patch height {patch_H}"
/opt/home/k8sworker/ci-ai/cibuilds/ov-notebook/OVNotebookOps-609/.workspace/scm/ov-notebook/notebooks/280-depth-anything/Depth-Anything/torchhub/facebookresearch_dinov2_main/dinov2/layers/patch_embed.py:74: TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
assert W % patch_W == 0, f"Input image width {W} is not a multiple of patch width: {patch_W}"
/opt/home/k8sworker/ci-ai/cibuilds/ov-notebook/OVNotebookOps-609/.workspace/scm/ov-notebook/notebooks/280-depth-anything/Depth-Anything/torchhub/facebookresearch_dinov2_main/vision_transformer.py:183: TracerWarning: Converting a tensor to a Python boolean might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
if npatch == N and w == h:
/opt/home/k8sworker/ci-ai/cibuilds/ov-notebook/OVNotebookOps-609/.workspace/scm/ov-notebook/notebooks/280-depth-anything/Depth-Anything/depth_anything/dpt.py:133: TracerWarning: Converting a tensor to a Python integer might cause the trace to be incorrect. We can't record the data flow of Python values, so this value will be treated as a constant in the future. This means that the trace might not generalize to other inputs!
out = F.interpolate(out, (int(patch_h * 14), int(patch_w * 14)), mode="bilinear", align_corners=True)
OpenVINO モデル推論を実行¶
OpenVINO モデルを実行する準備が整いました。
推論デバイスの選択¶
ワークを開始するには、ドロップダウン・リストから推論デバイスを選択します。
import ipywidgets as widgets
core = ov.Core()
device = widgets.Dropdown(
options=core.available_devices + ["AUTO"],
value="AUTO",
description="Device:",
disabled=False,
)
device
Dropdown(description='Device:', index=1, options=('CPU', 'AUTO'), value='AUTO')
compiled_model = core.compile_model(OV_DEPTH_ANYTHING_PATH, device.value)
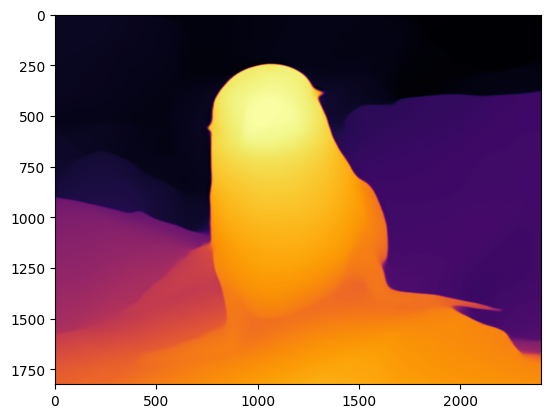
画像に対して推論を実行¶
res = compiled_model(image)[0]
depth = res[0]
depth = cv2.resize(depth, (w, h))
depth = (depth - depth.min()) / (depth.max() - depth.min()) * 255.0
depth = depth.astype(np.uint8)
depth_color = cv2.applyColorMap(depth, cv2.COLORMAP_INFERNO)
plt.imshow(depth_color[:, :, ::-1]);
ビデオ上で推論を実行¶
download_file("https://storage.openvinotoolkit.org/repositories/openvino_notebooks/data/data/video/Coco%20Walking%20in%20Berkeley.mp4", "./Coco Walking in Berkeley.mp4")
VIDEO_FILE = "./Coco Walking in Berkeley.mp4"
# Number of seconds of input video to process. Set `NUM_SECONDS` to 0 to process
# the full video.
NUM_SECONDS = 4
# Set `ADVANCE_FRAMES` to 1 to process every frame from the input video
# Set `ADVANCE_FRAMES` to 2 to process every second frame. This reduces
# the time it takes to process the video.
ADVANCE_FRAMES = 2
# Set `SCALE_OUTPUT` to reduce the size of the result video
# If `SCALE_OUTPUT` is 0.5, the width and height of the result video
# will be half the width and height of the input video.
SCALE_OUTPUT = 0.5
# The format to use for video encoding. The 'vp09` is slow,
# but it works on most systems.
# Try the `THEO` encoding if you have FFMPEG installed.
# FOURCC = cv2.VideoWriter_fourcc(*"THEO")
FOURCC = cv2.VideoWriter_fourcc(*"vp09")
# Create Path objects for the input video and the result video.
output_directory = Path("output")
output_directory.mkdir(exist_ok=True)
result_video_path = output_directory / f"{Path(VIDEO_FILE).stem}_depth_anything.mp4"
Coco Walking in Berkeley.mp4: 0%| | 0.00/877k [00:00<?, ?B/s]
cap = cv2.VideoCapture(str(VIDEO_FILE))
ret, image = cap.read()
if not ret:
raise ValueError(f"The video at {VIDEO_FILE} cannot be read.")
input_fps = cap.get(cv2.CAP_PROP_FPS)
input_video_frame_height, input_video_frame_width = image.shape[:2]
target_fps = input_fps / ADVANCE_FRAMES
target_frame_height = int(input_video_frame_height * SCALE_OUTPUT)
target_frame_width = int(input_video_frame_width * SCALE_OUTPUT)
cap.release()
print(
f"The input video has a frame width of {input_video_frame_width}, "
f"frame height of {input_video_frame_height} and runs at {input_fps:.2f} fps"
)
print(
"The output video will be scaled with a factor "
f"{SCALE_OUTPUT}, have width {target_frame_width}, "
f" height {target_frame_height}, and run at {target_fps:.2f} fps"
)
The input video has a frame width of 640, frame height of 360 and runs at 30.00 fps
The output video will be scaled with a factor 0.5, have width 320, height 180, and run at 15.00 fps
def normalize_minmax(data):
"""Normalizes the values in `data` between 0 and 1"""
return (data - data.min()) / (data.max() - data.min())
def convert_result_to_image(result, colormap="viridis"):
"""
Convert network result of floating point numbers to an RGB image with
integer values from 0-255 by applying a colormap.
`result` is expected to be a single network result in 1,H,W shape
`colormap` is a matplotlib colormap.
See https://matplotlib.org/stable/tutorials/colors/colormaps.html
"""
result = result.squeeze(0)
result = normalize_minmax(result)
result = result * 255
result = result.astype(np.uint8)
result = cv2.applyColorMap(result, cv2.COLORMAP_INFERNO)[:, :, ::-1]
return result
def to_rgb(image_data) -> np.ndarray:
"""
Convert image_data from BGR to RGB
"""
return cv2.cvtColor(image_data, cv2.COLOR_BGR2RGB)
import time
from IPython.display import (
HTML,
FileLink,
Pretty,
ProgressBar,
Video,
clear_output,
display,
)
# Initialize variables.
input_video_frame_nr = 0
start_time = time.perf_counter()
total_inference_duration = 0
# Open the input video
cap = cv2.VideoCapture(str(VIDEO_FILE))
# Create a result video.
out_video = cv2.VideoWriter(
str(result_video_path),
FOURCC,
target_fps,
(target_frame_width * 2, target_frame_height),
)
num_frames = int(NUM_SECONDS * input_fps)
total_frames = cap.get(cv2.CAP_PROP_FRAME_COUNT) if num_frames == 0 else num_frames
progress_bar = ProgressBar(total=total_frames)
progress_bar.display()
try:
while cap.isOpened():
ret, image = cap.read()
if not ret:
cap.release()
break
if input_video_frame_nr >= total_frames:
break
h, w = image.shape[:-1]
input_image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB) / 255.0
input_image = transform({'image': input_image})['image']
# Reshape the image to network input shape NCHW.
input_image = np.expand_dims(input_image, 0)
# Do inference.
inference_start_time = time.perf_counter()
result = compiled_model(input_image)[0]
inference_stop_time = time.perf_counter()
inference_duration = inference_stop_time - inference_start_time
total_inference_duration += inference_duration
if input_video_frame_nr % (10 * ADVANCE_FRAMES) == 0:
clear_output(wait=True)
progress_bar.display()
# input_video_frame_nr // ADVANCE_FRAMES gives the number of
# Frames that have been processed by the network.
display(
Pretty(
f"Processed frame {input_video_frame_nr // ADVANCE_FRAMES}"
f"/{total_frames // ADVANCE_FRAMES}. "
f"Inference time per frame: {inference_duration:.2f} seconds "
f"({1/inference_duration:.2f} FPS)"
)
)
# Transform the network result to a RGB image.
result_frame = to_rgb(convert_result_to_image(result))
# Resize the image and the result to a target frame shape.
result_frame = cv2.resize(result_frame, (target_frame_width, target_frame_height))
image = cv2.resize(image, (target_frame_width, target_frame_height))
# Put the image and the result side by side.
stacked_frame = np.hstack((image, result_frame))
# Save a frame to the video.
out_video.write(stacked_frame)
input_video_frame_nr = input_video_frame_nr + ADVANCE_FRAMES
cap.set(1, input_video_frame_nr)
progress_bar.progress = input_video_frame_nr
progress_bar.update()
except KeyboardInterrupt:
print("Processing interrupted.")
finally:
clear_output()
processed_frames = num_frames // ADVANCE_FRAMES
out_video.release()
cap.release()
end_time = time.perf_counter()
duration = end_time - start_time
print(
f"Processed {processed_frames} frames in {duration:.2f} seconds. "
f"Total FPS (including video processing): {processed_frames/duration:.2f}."
f"Inference FPS: {processed_frames/total_inference_duration:.2f} "
)
print(f"Video saved to '{str(result_video_path)}'.")
Processed 60 frames in 13.14 seconds. Total FPS (including video processing): 4.57.Inference FPS: 10.78
Video saved to 'output/Coco Walking in Berkeley_depth_anything.mp4'.
video = Video(result_video_path, width=800, embed=True)
if not result_video_path.exists():
plt.imshow(stacked_frame)
raise ValueError("OpenCV was unable to write the video file. Showing one video frame.")
else:
print(f"Showing video saved at\n{result_video_path.resolve()}")
print(
"If you cannot see the video in your browser, please click on the "
"following link to download the video "
)
video_link = FileLink(result_video_path)
video_link.html_link_str = "<a href='%s' download>%s</a>"
display(HTML(video_link._repr_html_()))
display(video)
Showing video saved at
/opt/home/k8sworker/ci-ai/cibuilds/ov-notebook/OVNotebookOps-609/.workspace/scm/ov-notebook/notebooks/280-depth-anything/Depth-Anything/output/Coco Walking in Berkeley_depth_anything.mp4
If you cannot see the video in your browser, please click on the following link to download the video
インタラクティブなデモ¶
独自の画像にモデルを適用できます。結果の画像上でスライダーを移動して、元の画像と深度マップビューを切り替えることができます。
import gradio as gr
import cv2
import numpy as np
import os
import tempfile
from gradio_imageslider import ImageSlider
css = """
#img-display-container {
max-height: 100vh;
}
#img-display-input {
max-height: 80vh;
}
#img-display-output {
max-height: 80vh;
}
"""
title = "# Depth Anything with OpenVINO"
def predict_depth(model, image):
return model(image)[0]
with gr.Blocks(css=css) as demo:
gr.Markdown(title)
gr.Markdown("### Depth Prediction demo")
gr.Markdown("You can slide the output to compare the depth prediction with input image")
with gr.Row():
input_image = gr.Image(label="Input Image", type='numpy', elem_id='img-display-input')
depth_image_slider = ImageSlider(label="Depth Map with Slider View", elem_id='img-display-output', position=0)
raw_file = gr.File(label="16-bit raw depth (can be considered as disparity)")
submit = gr.Button("Submit")
def on_submit(image):
original_image = image.copy()
h, w = image.shape[:2]
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB) / 255.0
image = transform({'image': image})['image']
image = np.expand_dims(image, 0)
depth = predict_depth(compiled_model, image)
depth = cv2.resize(depth[0], (w, h), interpolation=cv2.INTER_LINEAR)
raw_depth = Image.fromarray(depth.astype('uint16'))
tmp = tempfile.NamedTemporaryFile(suffix='.png', delete=False)
raw_depth.save(tmp.name)
depth = (depth - depth.min()) / (depth.max() - depth.min()) * 255.0
depth = depth.astype(np.uint8)
colored_depth = cv2.applyColorMap(depth, cv2.COLORMAP_INFERNO)[:, :, ::-1]
return [(original_image, colored_depth), tmp.name]
submit.click(on_submit, inputs=[input_image], outputs=[depth_image_slider, raw_file])
example_files = os.listdir('assets/examples')
example_files.sort()
example_files = [os.path.join('assets/examples', filename) for filename in example_files]
examples = gr.Examples(examples=example_files, inputs=[input_image], outputs=[depth_image_slider, raw_file], fn=on_submit, cache_examples=False)
if __name__ == '__main__':
try:
demo.queue().launch(debug=False)
except Exception:
demo.queue().launch(share=True, debug=False)
# if you are launching remotely, specify server_name and server_port
# demo.launch(server_name='your server name', server_port='server port in int')
# Read more in the docs: https://gradio.app/docs/
Running on local URL: http://127.0.0.1:7860 To create a public link, set share=True in launch().