OpenVINO によるモノデプス推定¶
この Jupyter ノートブックはオンラインで起動でき、ブラウザーのウィンドウで対話型環境を開きます。ローカルにインストールすることもできます。次のオプションのいずれかを選択します。



このチュートリアルでは、OpenVINO の MidasNet を使用した単眼深度 (モノデプス) 推定を示します。モデル情報はこちらでご覧いただけます。
モノデプス¶
モノデプスとは?¶
単眼深度 (モノデプス) 推定は、単一の画像を使用してシーンの奥行きを推定するタスクです。これは、ロボット工学、3D 再構成、医療画像処理、および自律システムにおいて多くの潜在的な用途があります。このチュートリアルでは、Embodied AI Foundation によって開発された MiDaS と呼ばれるニューラル・ネットワーク・モデルを使用します。詳細については、以下の研究論文を参照してください。
R. Ranftl, K. Lasinger, D. Hafner, K. Schindler and V. Koltun, “Towards Robust Monocular Depth Estimation: Mixing Datasets for Zero-shot Cross-dataset Transfer,” in IEEE Transactions on Pattern Analysis and Machine Intelligence, doi: 10.1109/TPAMI.2020.3019967.
要件をインストール¶
%pip install -q "openvino>=2023.1.0"
%pip install -q matplotlib opencv-python requests tqdm
# Fetch `notebook_utils` module
import urllib.request
urllib.request.urlretrieve(
url='https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/main/notebooks/utils/notebook_utils.py',
filename='notebook_utils.py'
)
Note: you may need to restart the kernel to use updated packages.
Note: you may need to restart the kernel to use updated packages.
('notebook_utils.py', <http.client.HTTPMessage at 0x7fe5c4f7e130>)
インポート¶
import time
from pathlib import Path
import cv2
import matplotlib.cm
import matplotlib.pyplot as plt
import numpy as np
from IPython.display import (
HTML,
FileLink,
Pretty,
ProgressBar,
Video,
clear_output,
display,
)
import openvino as ov
from notebook_utils import download_file, load_image
モデルのダウンロード¶
モデルは OpenVINO 中間表現 (IR) 形式です。
model_folder = Path('model')
ir_model_url = 'https://storage.openvinotoolkit.org/repositories/openvino_notebooks/models/depth-estimation-midas/FP32/'
ir_model_name_xml = 'MiDaS_small.xml'
ir_model_name_bin = 'MiDaS_small.bin'
download_file(ir_model_url + ir_model_name_xml, filename=ir_model_name_xml, directory=model_folder)
download_file(ir_model_url + ir_model_name_bin, filename=ir_model_name_bin, directory=model_folder)
model_xml_path = model_folder / ir_model_name_xml
model/MiDaS_small.xml: 0%| | 0.00/268k [00:00<?, ?B/s]
model/MiDaS_small.bin: 0%| | 0.00/31.6M [00:00<?, ?B/s]
def normalize_minmax(data):
"""Normalizes the values in `data` between 0 and 1"""
return (data - data.min()) / (data.max() - data.min())
def convert_result_to_image(result, colormap="viridis"):
"""
Convert network result of floating point numbers to an RGB image with
integer values from 0-255 by applying a colormap.
`result` is expected to be a single network result in 1,H,W shape
`colormap` is a matplotlib colormap.
See https://matplotlib.org/stable/tutorials/colors/colormaps.html
"""
cmap = matplotlib.cm.get_cmap(colormap)
result = result.squeeze(0)
result = normalize_minmax(result)
result = cmap(result)[:, :, :3] * 255
result = result.astype(np.uint8)
return result
def to_rgb(image_data) -> np.ndarray:
"""
Convert image_data from BGR to RGB
"""
return cv2.cvtColor(image_data, cv2.COLOR_BGR2RGB)
OpenVINO を使用して推論を実行するためにドロップダウン・リストからデバイスを選択します。
import ipywidgets as widgets
core = ov.Core()
device = widgets.Dropdown(
options=core.available_devices + ["AUTO"],
value='AUTO',
description='Device:',
disabled=False,
)
device
Dropdown(description='Device:', index=1, options=('CPU', 'AUTO'), value='AUTO')
core.read_model を使用してモデルを OpenVINO ランタイムにロードし、core.compile_model で指定したデバイス向けにコンパイルします。入力キーと出力キー、およびモデルの予想される入力形状を取得します。
core = ov.Core()
core.set_property({'CACHE_DIR': '../cache'})
model = core.read_model(model_xml_path)
compiled_model = core.compile_model(model=model, device_name=device.value)
input_key = compiled_model.input(0)
output_key = compiled_model.output(0)
network_input_shape = list(input_key.shape)
network_image_height, network_image_width = network_input_shape[2:]
入力画像の読み込み、サイズ変更、形状変更¶
入力画像は OpenCV で読み込まれ、ネットワーク入力サイズにサイズ変更され、(N,C,H,W) に再整形されます (N=画像数、C=チャネル数、H=高さ、W=幅)。
IMAGE_FILE = "https://storage.openvinotoolkit.org/repositories/openvino_notebooks/data/data/image/coco_bike.jpg"
image = load_image(path=IMAGE_FILE)
# Resize to input shape for network.
resized_image = cv2.resize(src=image, dsize=(network_image_height, network_image_width))
# Reshape the image to network input shape NCHW.
input_image = np.expand_dims(np.transpose(resized_image, (2, 0, 1)), 0)
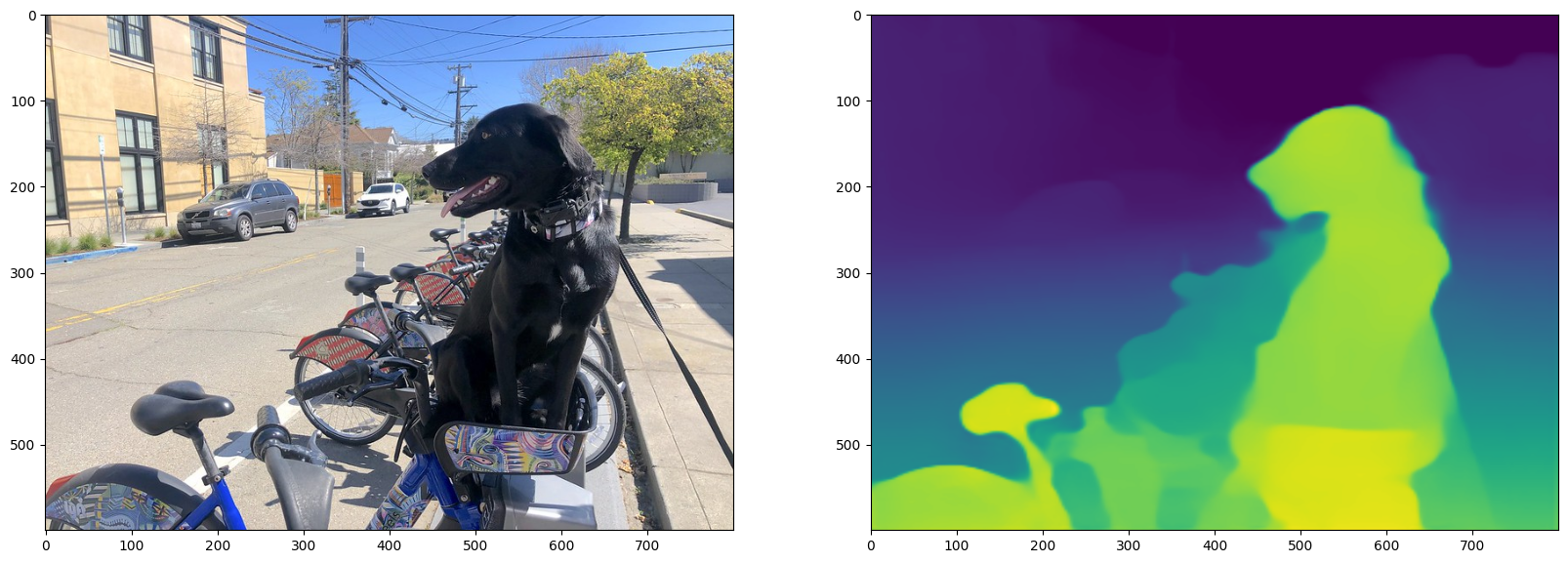
画像の推論¶
推論を実行して、結果を画像に変換し、元の画像形状にサイズ変更します。
result = compiled_model([input_image])[output_key]
# Convert the network result of disparity map to an image that shows
# distance as colors.
result_image = convert_result_to_image(result=result)
# Resize back to original image shape. The `cv2.resize` function expects shape
# in (width, height), [::-1] reverses the (height, width) shape to match this.
result_image = cv2.resize(result_image, image.shape[:2][::-1])
/tmp/ipykernel_2841459/2076527990.py:15: MatplotlibDeprecationWarning: The get_cmap function was deprecated in Matplotlib 3.7 and will be removed two minor releases later. Usematplotlib.colormaps[name]ormatplotlib.colormaps.get_cmap(obj)instead. cmap = matplotlib.cm.get_cmap(colormap)
モノデプス画像を表示¶
fig, ax = plt.subplots(1, 2, figsize=(20, 15))
ax[0].imshow(to_rgb(image))
ax[1].imshow(result_image);
デフォルトでは、すべてが動作していることを確認するため、最初の 4 秒だけが処理されます。これを変更するには、下のセルの NUM_SECONDS を変更します。ビデオ全体を処理するには、NUM_SECONDS を 0 に設定します。
ビデオ設定¶
# Video source: https://www.youtube.com/watch?v=fu1xcQdJRws (Public Domain)
VIDEO_FILE = "https://storage.openvinotoolkit.org/repositories/openvino_notebooks/data/data/video/Coco%20Walking%20in%20Berkeley.mp4"
# Number of seconds of input video to process. Set `NUM_SECONDS` to 0 to process
# the full video.
NUM_SECONDS = 4
# Set `ADVANCE_FRAMES` to 1 to process every frame from the input video
# Set `ADVANCE_FRAMES` to 2 to process every second frame. This reduces
# the time it takes to process the video.
ADVANCE_FRAMES = 2
# Set `SCALE_OUTPUT` to reduce the size of the result video
# If `SCALE_OUTPUT` is 0.5, the width and height of the result video
# will be half the width and height of the input video.
SCALE_OUTPUT = 0.5
# The format to use for video encoding. The 'vp09` is slow,
# but it works on most systems.
# Try the `THEO` encoding if you have FFMPEG installed.
# FOURCC = cv2.VideoWriter_fourcc(*"THEO")
FOURCC = cv2.VideoWriter_fourcc(*"vp09")
# Create Path objects for the input video and the result video.
output_directory = Path("output")
output_directory.mkdir(exist_ok=True)
result_video_path = output_directory / f"{Path(VIDEO_FILE).stem}_monodepth.mp4"
ビデオのロード¶
上の [Video Settings] セルで設定した VIDEO_FILE からビデオをロードします。ビデオを開いてフレームの幅、高さ、fps を読み取り、モノデプスビデオのプロパティー値を計算します。
cap = cv2.VideoCapture(str(VIDEO_FILE))
ret, image = cap.read()
if not ret:
raise ValueError(f"The video at {VIDEO_FILE} cannot be read.")
input_fps = cap.get(cv2.CAP_PROP_FPS)
input_video_frame_height, input_video_frame_width = image.shape[:2]
target_fps = input_fps / ADVANCE_FRAMES
target_frame_height = int(input_video_frame_height * SCALE_OUTPUT)
target_frame_width = int(input_video_frame_width * SCALE_OUTPUT)
cap.release()
print(
f"The input video has a frame width of {input_video_frame_width}, "
f"frame height of {input_video_frame_height} and runs at {input_fps:.2f} fps"
)
print(
"The monodepth video will be scaled with a factor "
f"{SCALE_OUTPUT}, have width {target_frame_width}, "
f" height {target_frame_height}, and run at {target_fps:.2f} fps"
)
The input video has a frame width of 640, frame height of 360 and runs at 30.00 fps
The monodepth video will be scaled with a factor 0.5, have width 320, height 180, and run at 15.00 fps
ビデオで推論を実行しモノデプスビデオを作成¶
# Initialize variables.
input_video_frame_nr = 0
start_time = time.perf_counter()
total_inference_duration = 0
# Open the input video
cap = cv2.VideoCapture(str(VIDEO_FILE))
# Create a result video.
out_video = cv2.VideoWriter(
str(result_video_path),
FOURCC,
target_fps,
(target_frame_width * 2, target_frame_height),
)
num_frames = int(NUM_SECONDS * input_fps)
total_frames = cap.get(cv2.CAP_PROP_FRAME_COUNT) if num_frames == 0 else num_frames
progress_bar = ProgressBar(total=total_frames)
progress_bar.display()
try:
while cap.isOpened():
ret, image = cap.read()
if not ret:
cap.release()
break
if input_video_frame_nr >= total_frames:
break
# Only process every second frame.
# Prepare a frame for inference.
# Resize to the input shape for network.
resized_image = cv2.resize(src=image, dsize=(network_image_height, network_image_width))
# Reshape the image to network input shape NCHW.
input_image = np.expand_dims(np.transpose(resized_image, (2, 0, 1)), 0)
# Do inference.
inference_start_time = time.perf_counter()
result = compiled_model([input_image])[output_key]
inference_stop_time = time.perf_counter()
inference_duration = inference_stop_time - inference_start_time
total_inference_duration += inference_duration
if input_video_frame_nr % (10 * ADVANCE_FRAMES) == 0:
clear_output(wait=True)
progress_bar.display()
# input_video_frame_nr // ADVANCE_FRAMES gives the number of
# Frames that have been processed by the network.
display(
Pretty(
f"Processed frame {input_video_frame_nr // ADVANCE_FRAMES}"
f"/{total_frames // ADVANCE_FRAMES}. "
f"Inference time per frame: {inference_duration:.2f} seconds "
f"({1/inference_duration:.2f} FPS)"
)
)
# Transform the network result to a RGB image.
result_frame = to_rgb(convert_result_to_image(result))
# Resize the image and the result to a target frame shape.
result_frame = cv2.resize(result_frame, (target_frame_width, target_frame_height))
image = cv2.resize(image, (target_frame_width, target_frame_height))
# Put the image and the result side by side.
stacked_frame = np.hstack((image, result_frame))
# Save a frame to the video.
out_video.write(stacked_frame)
input_video_frame_nr = input_video_frame_nr + ADVANCE_FRAMES
cap.set(1, input_video_frame_nr)
progress_bar.progress = input_video_frame_nr
progress_bar.update()
except KeyboardInterrupt:
print("Processing interrupted.")
finally:
clear_output()
processed_frames = num_frames // ADVANCE_FRAMES
out_video.release()
cap.release()
end_time = time.perf_counter()
duration = end_time - start_time
print(
f"Processed {processed_frames} frames in {duration:.2f} seconds. "
f"Total FPS (including video processing): {processed_frames/duration:.2f}."
f"Inference FPS: {processed_frames/total_inference_duration:.2f} "
)
print(f"Monodepth Video saved to '{str(result_video_path)}'.")
Processed 60 frames in 37.50 seconds. Total FPS (including video processing): 1.60.Inference FPS: 43.40
Monodepth Video saved to 'output/Coco%20Walking%20in%20Berkeley_monodepth.mp4'.
モノデプスビデオを表示¶
video = Video(result_video_path, width=800, embed=True)
if not result_video_path.exists():
plt.imshow(stacked_frame)
raise ValueError("OpenCV was unable to write the video file. Showing one video frame.")
else:
print(
"If you cannot see the video in your browser, please click on the "
"following link to download the video "
)
video_link = FileLink(result_video_path)
video_link.html_link_str = "<a href='%s' download>%s</a>"
display(HTML(video_link._repr_html_()))
display(video)
Showing monodepth video saved at
/opt/home/k8sworker/ci-ai/cibuilds/ov-notebook/OVNotebookOps-609/.workspace/scm/ov-notebook/notebooks/201-vision-monodepth/output/Coco%20Walking%20in%20Berkeley_monodepth.mp4
If you cannot see the video in your browser, please click on the following link to download the video