位置認識 Python* デモ#
このデモでは、OpenVINO™ を使用して位置認識モデルを実行する方法を示します。
注: バッチサイズ 1 のみがサポートされます。
どのように動作するか#
デモ・アプリケーションは、中間表現 (IR) 形式の位置認識モデルを想定しています。
デモ・アプリケーションは入力として次を受け取ります:
画像へのパス
画像のあるフォルダーへのパス
ビデオファイルまたは Web カメラのデバイスノードへのパス
デモのワークフローを次に示します:
デモ・アプリケーションは入力フレームを読み取ります。
抽出された入力フレームは、埋め込みベクトルを計算するニューラル・ネットワークに渡されます。
次に、デモ・アプリケーションは、ギャラリー内のどの画像がフレーム上に表示される画像に最も類似しているか判断するため、画像のギャラリー内で計算された埋め込みを検索します。
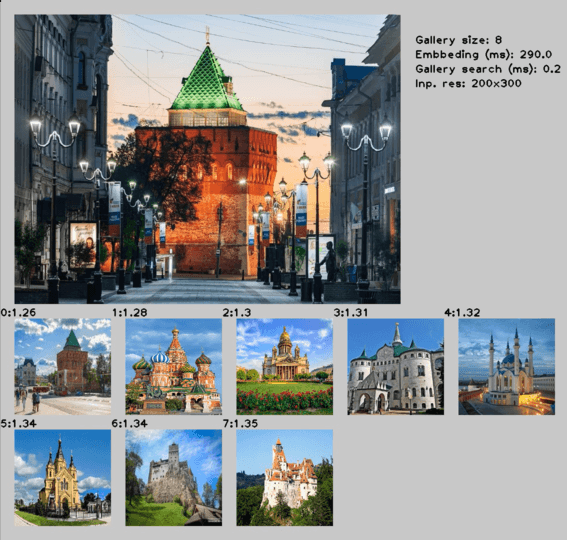
アプリケーションは、次のオブジェクトが表示されるグラフィカル・ウィンドウで動作の結果を視覚化します。
入力フレーム。
ギャラリーから最も類似した画像の上位 10。
パフォーマンス特性。
注: デフォルトでは、Open Model Zoo のデモは BGR チャネル順序での入力を期待します。RGB 順序で動作するようにモデルをトレーニングした場合は、サンプルまたはデモ・アプリケーションでデフォルトのチャネル順序を手動で再配置するか、
--reverse_input_channels引数を指定したモデル・オプティマイザー・ツールを使用してモデルを再変換する必要があります。引数の詳細については、[前処理計算の埋め込み](@ref openvino_docs_MO_DG_Additional_Optimization_Use_Cases) の入力チャネルを反転するセクションを参照してください。
実行の準備#
デモの入力画像またはビデオファイルについては、Open Model Zoo デモの概要のデモに使用できるメディアファイルのセクションを参照してください。デモでサポートされるモデルリストは、<omz_dir>/demos/place_recognition_demo/python/models.lst ファイルにあります。このファイルは、モデル・ダウンローダーおよびコンバーターのパラメーターとして使用され、モデルをダウンロードし、必要に応じて OpenVINO IR 形式 (*.xml + *.bin) に変換できます。
モデル・ダウンローダーの使用例:
omz_downloader --list models.lstモデル・コンバーターの使用例:
omz_converter --list models.lstサポートされるモデル#
netvlad-tf
注: 各種デバイス向けのモデル推論サポートの詳細については、インテルの事前トレーニング・モデルのデバイスサポートとパブリックの事前トレーニング・モデルのデバイスサポートの表を参照してください。
実行する#
-h オプションを指定してアプリケーションを実行すると、使用方法が表示されます:
usage: place_recognition_demo.py [-h] -m MODEL -i INPUT -gf GALLERY_FOLDER
[--gallery_size GALLERY_SIZE] [--loop]
[-o OUTPUT] [-limit OUTPUT_LIMIT] [-d DEVICE]
[--no_show] [-u UTILIZATION_MONITORS]
Options:
-h, --help Show this help message and exit.
-m MODEL, --model MODEL
Required. Path to an .xml file with a trained model.
-i INPUT, --input INPUT
Required.An input to process.The input must be a single image, a folder of images, video file or camera id.
-gf GALLERY_FOLDER, --gallery_folder GALLERY_FOLDER
Required. Path to a folder with images in the gallery.
--gallery_size GALLERY_SIZE
Optional.Number of images from the gallery used for
processing
--loop
Optional.Enable reading the input in a loop.
-o OUTPUT, --output OUTPUT
Optional.Name of the output file(s) to save.Frames of odd width or height can be truncated.See https://github.com/opencv/opencv/pull/24086
-limit OUTPUT_LIMIT, --output_limit OUTPUT_LIMIT
Optional.Number of frames to store in output.If 0 is set, all frames are stored.
-d DEVICE, --device DEVICE
Optional.Specify the target device to infer on:
CPU or GPU.The demo will look for a suitable plugin for device specified
(by default, it is CPU).--No_showno_show
Optional.Do not visualize inference results.
-u UTILIZATION_MONITORS, --utilization_monitors UTILIZATION_MONITORS
Optional.List of monitors to show initially.オプションの空のリストを指定してアプリケーションを実行すると、短い使用法メッセージとエラーメッセージが表示されます。
デモを実行するには、IR 形式のモデル、ギャラリー画像のあるディレクトリー、および入力ビデオ、画像、または画像のあるフォルダーへのパスを指定します:
python place_recognition_demo.py \
-m <path_to_model>/netvlad-tf.xml \
-i <path_to_file>/image.jpg \
-gf <path>/gallery_folder注: 単一の画像を入力として指定すると、デモはすぐに処理してレンダリングし終了します。推論結果を画面上で継続的に視覚化するには、
loopオプションを適用します。これにより、単一の画像がループで処理されます。
-o オプションを使用すると、処理結果を Motion JPEG AVI ファイル、または別の JPEG または PNG ファイルに保存できます:
処理結果を AVI ファイルに保存するには、
avi拡張子を付けた出力ファイル名を指定します (例:-o output.avi)。処理結果を画像として保存するには、出力画像ファイルのテンプレート名を拡張子
jpgまたはpngで指定します (例:-o output_%03d.jpg)。実際のファイル名は、実行時に正規表現%03dをフレーム番号に置き換えることによってテンプレートから構築され、output_000.jpg、output_001.jpgなどになります。カメラなど連続入力ストリームでディスク領域のオーバーランを避けるため、limitオプションを使用して出力ファイルに保存されるデータの量を制限できます。デフォルト値は 1000 です。これを変更するには、-limit Nオプションを適用します。ここで、Nは保存するフレームの数です。
注: Windows* システムには、デフォルトでは Motion JPEG コーデックがインストールされていない場合があります。この場合、OpenVINO ™ インストール・パッケージに付属する、
<INSTALL_DIR>/opencv/ffmpeg-download.ps1にある PowerShell スクリプトを使用して OpenCV FFMPEG バックエンドをダウンロードできます。OpenVINO ™ がシステムで保護されたフォルダーにインストールされている場合 (一般的なケース)、スクリプトは管理者権限で実行する必要があります。あるいは、結果を画像として保存することもできます。
デモの出力#
アプリケーションは OpenCV を使用してギャラリーの検索結果を表示します。デモレポート
FPS: ビデオフレーム処理の平均レート (1 秒あたりのフレーム数)。
レイテンシー: 1 フレームの処理 (フレームの読み取りから結果の表示まで) に必要な平均時間。これらのメトリックの両方を使用して、アプリケーション・レベルのパフォーマンスを測定できます。