産業用メーター読み取り#
この Jupyter ノートブックはオンラインで起動でき、ブラウザーのウィンドウで対話型環境を開きます。ローカルにインストールすることもできます。次のオプションのいずれかを選択します:


このノートブックでは、OpenVINO ランタイムを使用して産業用メーターリーダーを作成する方法を説明します。事前トレーニングされた PPYOLOv2 PaddlePaddle モデルと DeepLabV3P を使用して、複数の推論タスク・パイプラインを構築します:
検出モデルを実行してメーターを見つけ、元の写真からトリミングします。
これらのトリミングされたメーターに対してセグメント化モデルを実行して、ポインターとスケールのインスタンスを取得します。
スケールマップでポインターの位置を見つけます。
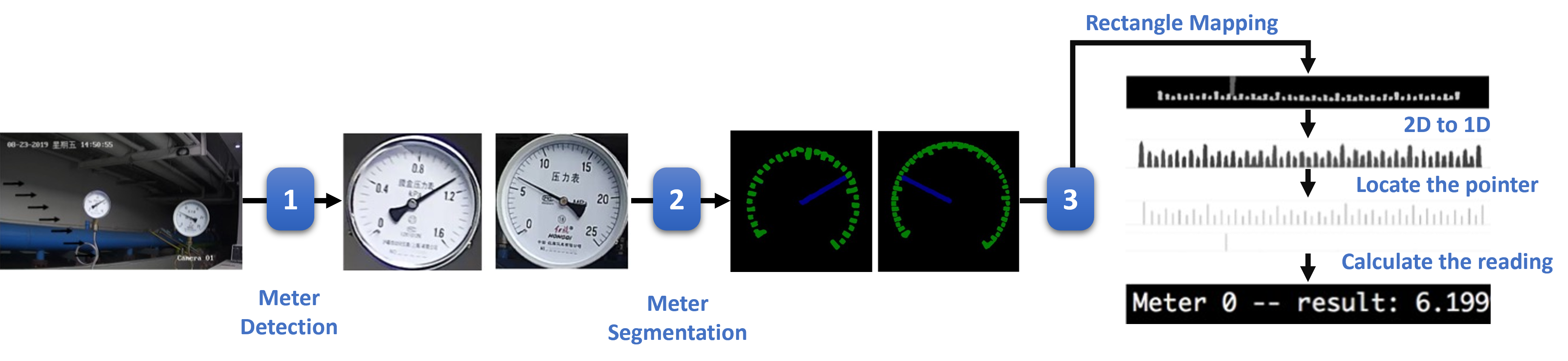
ワークフロー#
目次:
import platform
# openvino パッケージをインストール
%pip install -q "openvino>=2023.1.0" opencv-python tqdm
if platform.system() != "Windows":
%pip install -q "matplotlib>=3.4"
else:
%pip install -q "matplotlib>=3.4,<3.7"Note: you may need to restart the kernel to use updated packages.
Note: you may need to restart the kernel to use updated packages.インポート#
import os
from pathlib import Path
import numpy as np
import math
import cv2
import tarfile
import matplotlib.pyplot as plt
import openvino as ov
# `notebook_utils` モジュールを取得
import requests
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/notebook_utils.py",
)
open("notebook_utils.py", "w").write(r.text)
from notebook_utils import download_file, segmentation_map_to_imageモデルとテストイメージを準備#
PaddlePaddle コミュニティーから PPYOLOv2 および DeepLabV3P の事前トレーニング済みモデルをダウンロードします。
MODEL_DIR = "model"
DATA_DIR = "data"
DET_MODEL_LINK = "https://storage.openvinotoolkit.org/repositories/openvino_notebooks/models/meter-reader/meter_det_model.tar.gz"
SEG_MODEL_LINK = "https://storage.openvinotoolkit.org/repositories/openvino_notebooks/models/meter-reader/meter_seg_model.tar.gz"
DET_FILE_NAME = DET_MODEL_LINK.split("/")[-1]
SEG_FILE_NAME = SEG_MODEL_LINK.split("/")[-1]
IMG_LINK = "https://user-images.githubusercontent.com/91237924/170696219-f68699c6-1e82-46bf-aaed-8e2fc3fa5f7b.jpg"
IMG_FILE_NAME = IMG_LINK.split("/")[-1]
IMG_PATH = Path(f"{DATA_DIR}/{IMG_FILE_NAME}")
os.makedirs(MODEL_DIR, exist_ok=True)
download_file(DET_MODEL_LINK, directory=MODEL_DIR, show_progress=True)
file = tarfile.open(f"model/{DET_FILE_NAME}")
res = file.extractall("model")
if not res:
print(f'Detection Model Extracted to "./{MODEL_DIR}".')
else:
print("Error Extracting the Detection model.Please check the network.")
download_file(SEG_MODEL_LINK, directory=MODEL_DIR, show_progress=True)
file = tarfile.open(f"model/{SEG_FILE_NAME}")
res = file.extractall("model")
if not res:
print(f'Segmentation Model Extracted to "./{MODEL_DIR}".')
else:
print("Error Extracting the Segmentation model.Please check the network.")
download_file(IMG_LINK, directory=DATA_DIR, show_progress=True)
if IMG_PATH.is_file():
print(f'Test Image Saved to "./{DATA_DIR}".')
else:
print("Error Downloading the Test Image.Please check the network.")model/meter_det_model.tar.gz: 0%| | 0.00/192M [00:00<?, ?B/s]Detection Model Extracted to "./model".model/meter_seg_model.tar.gz: 0%| | 0.00/94.9M [00:00<?, ?B/s]Segmentation Model Extracted to "./model".data/170696219-f68699c6-1e82-46bf-aaed-8e2fc3fa5f7b.jpg: 0%| | 0.00/183k [00:00<?, ?B/s]Test Image Saved to "./data".設定
読み取り計算用のパラメーター設定を追加します。
METER_SHAPE = [512, 512]
CIRCLE_CENTER = [256, 256]
CIRCLE_RADIUS = 250
PI = math.pi
RECTANGLE_HEIGHT = 120
RECTANGLE_WIDTH = 1570
TYPE_THRESHOLD = 40
COLORMAP = np.array([[28, 28, 28], [238, 44, 44], [250, 250, 250]])
# テスト画像データセットには 2 種類のメーターがあります
METER_CONFIG = [
{"scale_interval_value": 25.0 / 50.0, "range": 25.0, "unit": "(MPa)"},
{"scale_interval_value": 1.6 / 32.0, "range": 1.6, "unit": "(MPa)"}, ]
SEG_LABEL = {"background": 0, "pointer": 1, "scale": 2}モデルのロード#
モデルの読み込みと推論の共通クラスを定義します
# OpenVINO ランタイムを初期化
core = ov.Core()
class Model:
"""
This class represents a OpenVINO model object.
"""
def __init__(self, model_path, new_shape, device="CPU"):
"""
Initialize the model object
Param:
model_path (string): path of inference model
new_shape (dict): new shape of model input
"""
self.model = core.read_model(model=model_path)
self.model.reshape(new_shape)
self.compiled_model = core.compile_model(model=self.model, device_name=device)
self.output_layer = self.compiled_model.output(0)
def predict(self, input_image):
"""
Run inference
Param:
input_image (np.array): input data
Retuns:
result (np.array)): model output data
"""
result = self.compiled_model(input_image)[self.output_layer]
return resultデータ処理#
各モデルの前処理タスクと後処理タスクが含まれます。
def det_preprocess(input_image, target_size):
"""
Preprocessing the input data for detection task
Param:
input_image (np.array): input data
size (int): the image size required by model input layer
Retuns:
img.astype (np.array): preprocessed image
"""
img = cv2.resize(input_image, (target_size, target_size))
img = np.transpose(img, [2, 0, 1]) / 255
img = np.expand_dims(img, 0)
img_mean = np.array([0.485, 0.456, 0.406]).reshape((3, 1, 1))
img_std = np.array([0.229, 0.224, 0.225]).reshape((3, 1, 1))
img -= img_mean
img /= img_std
return img.astype(np.float32)
def filter_bboxes(det_results, score_threshold):
"""
Filter out the detection results with low confidence
Param:
det_results (list[dict]): detection results
score_threshold (float): confidence threshold
Retuns:
filtered_results (list[dict]): filter detection results
"""
filtered_results = []
for i in range(len(det_results)):
if det_results[i, 1] > score_threshold:
filtered_results.append(det_results[i])
return filtered_results
def roi_crop(image, results, scale_x, scale_y):
"""
Crop the area of detected meter of original image
Param:
img (np.array): original image
det_results (list[dict]): detection results
scale_x (float): the scale value in x axis
scale_y (float): the scale value in y axis
Retuns:
roi_imgs (list[np.array]): the list of meter images
loc (list[int]): the list of meter locations
"""
roi_imgs = []
loc = []
for result in results:
bbox = result[2:]
xmin, ymin, xmax, ymax = [
int(bbox[0] * scale_x),
int(bbox[1] * scale_y),
int(bbox[2] * scale_x),
int(bbox[3] * scale_y),
]
sub_img = image[ymin : (ymax + 1), xmin : (xmax + 1), :]
roi_imgs.append(sub_img)
loc.append([xmin, ymin, xmax, ymax])
return roi_imgs, loc
def roi_process(input_images, target_size, interp=cv2.INTER_LINEAR):
"""
Prepare the roi image of detection results data
Preprocessing the input data for segmentation task
Param:
input_images (list[np.array]): the list of meter images
target_size (list|tuple): height and width of resized image, e.g [heigh,width]
interp (int): the interp method for image reszing
Retuns:
img_list (list[np.array]): the list of processed images
resize_img (list[np.array]): for visualization
"""
img_list = list()
resize_list = list()
for img in input_images:
img_shape = img.shape
scale_x = float(target_size[1]) / float(img_shape[1])
scale_y = float(target_size[0]) / float(img_shape[0])
resize_img = cv2.resize(img, None, None, fx=scale_x, fy=scale_y, interpolation=interp)
resize_list.append(resize_img)
resize_img = resize_img.transpose(2, 0, 1) / 255
img_mean = np.array([0.5, 0.5, 0.5]).reshape((3, 1, 1))
img_std = np.array([0.5, 0.5, 0.5]).reshape((3, 1, 1))
resize_img -= img_mean
resize_img /= img_std
img_list.append(resize_img)
return img_list, resize_list
def erode(seg_results, erode_kernel):
"""
Erode the segmentation result to get the more clear instance of pointer and scale
Param:
seg_results (list[dict]): segmentation results
erode_kernel (int): size of erode_kernel
Return:
eroded_results (list[dict]): the lab map of eroded_results
"""
kernel = np.ones((erode_kernel, erode_kernel), np.uint8)
eroded_results = seg_results
for i in range(len(seg_results)):
eroded_results[i] = cv2.erode(seg_results[i].astype(np.uint8), kernel)
return eroded_results
def circle_to_rectangle(seg_results):
"""
Switch the shape of label_map from circle to rectangle
Param:
seg_results (list[dict]): segmentation results
Return:
rectangle_meters (list[np.array]): the rectangle of label map
"""
rectangle_meters = list()
for i, seg_result in enumerate(seg_results):
label_map = seg_result
# rectangle_meter のサイズは RECTANGLE_HEIGHT と RECTANGLE_WIDTH によって決まります
rectangle_meter = np.zeros((RECTANGLE_HEIGHT, RECTANGLE_WIDTH), dtype=np.uint8)
for row in range(RECTANGLE_HEIGHT):
for col in range(RECTANGLE_WIDTH):
theta = PI * 2 * (col + 1) / RECTANGLE_WIDTH
# メートル円の半径は長方形画像の高さにマッピングされます
rho = CIRCLE_RADIUS - row - 1
y = int(CIRCLE_CENTER[0] + rho * math.cos(theta) + 0.5)
x = int(CIRCLE_CENTER[1] - rho * math.sin(theta) + 0.5)
rectangle_meter[row, col] = label_map[y, x]
rectangle_meters.append(rectangle_meter)
return rectangle_meters
def rectangle_to_line(rectangle_meters):
"""
Switch the dimension of rectangle label map from 2D to 1D
Param:
rectangle_meters (list[np.array]): 2D rectangle OF label_map。
Return:
line_scales (list[np.array]): the list of scales value
line_pointers (list[np.array]): the list of pointers value
"""
line_scales = list()
line_pointers = list()
for rectangle_meter in rectangle_meters:
height, width = rectangle_meter.shape[0:2]
line_scale = np.zeros((width), dtype=np.uint8)
line_pointer = np.zeros((width), dtype=np.uint8)
for col in range(width):
for row in range(height):
if rectangle_meter[row, col] == SEG_LABEL["pointer"]:
line_pointer[col] += 1
elif rectangle_meter[row, col] == SEG_LABEL["scale"]:
line_scale[col] += 1
line_scales.append(line_scale)
line_pointers.append(line_pointer)
return line_scales, line_pointers
def mean_binarization(data_list):
"""
Binarize the data
Param:
data_list (list[np.array]): input data
Return:
binaried_data_list (list[np.array]): output data
"""
batch_size = len(data_list)
binaried_data_list = data_list
for i in range(batch_size):
mean_data = np.mean(data_list[i])
width = data_list[i].shape[0]
for col in range(width):
if data_list[i][col] < mean_data:
binaried_data_list[i][col] = 0
else:
binaried_data_list[i][col] = 1
return binaried_data_list
def locate_scale(line_scales):
"""
Find location of center of each scale
Param:
line_scales (list[np.array]): the list of binaried scales value
Return:
scale_locations (list[list]): location of each scale
"""
batch_size = len(line_scales)
scale_locations = list()
for i in range(batch_size):
line_scale = line_scales[i]
width = line_scale.shape[0]
find_start = False
one_scale_start = 0
one_scale_end = 0
locations = list()
for j in range(width - 1):
if line_scale[j] > 0 and line_scale[j + 1] > 0:
if not find_start:
one_scale_start = j
find_start = True
if find_start:
if line_scale[j] == 0 and line_scale[j + 1] == 0:
one_scale_end = j - 1
one_scale_location = (one_scale_start + one_scale_end) / 2
locations.append(one_scale_location)
one_scale_start = 0
one_scale_end = 0
find_start = False
scale_locations.append(locations)
return scale_locations
def locate_pointer(line_pointers):
"""
Find location of center of pointer
Param:
line_scales (list[np.array]): the list of binaried pointer value
Return:
scale_locations (list[list]): location of pointer
"""
batch_size = len(line_pointers)
pointer_locations = list()
for i in range(batch_size):
line_pointer = line_pointers[i]
find_start = False
pointer_start = 0
pointer_end = 0
location = 0
width = line_pointer.shape[0]
for j in range(width - 1):
if line_pointer[j] > 0 and line_pointer[j + 1] > 0:
if not find_start:
pointer_start = j
find_start = True
if find_start:
if line_pointer[j] == 0 and line_pointer[j + 1] == 0:
pointer_end = j - 1
location = (pointer_start + pointer_end) / 2
find_start = False
break
pointer_locations.append(location)
return pointer_locations
def get_relative_location(scale_locations, pointer_locations):
"""
Match location of pointer and scales
Param:
scale_locations (list[list]): location of each scale
pointer_locations (list[list]): location of pointer
Return:
pointed_scales (list[dict]): a list of dict with:
'num_scales': total number of scales
'pointed_scale': predicted number of scales
"""
pointed_scales = list()
for scale_location, pointer_location in zip(scale_locations, pointer_locations):
num_scales = len(scale_location)
pointed_scale = -1
if num_scales > 0:
for i in range(num_scales - 1):
if scale_location[i] <= pointer_location < scale_location[i + 1]:
pointed_scale = i + (pointer_location - scale_location[i]) / (scale_location[i + 1] - scale_location[i] + 1e-05) + 1
result = {"num_scales": num_scales, "pointed_scale": pointed_scale}
pointed_scales.append(result)
return pointed_scales
def calculate_reading(pointed_scales):
"""
Calculate the value of meter according to the type of meter
Param:
pointed_scales (list[list]): predicted number of scales
Return:
readings (list[float]): the list of values read from meter
"""
readings = list()
batch_size = len(pointed_scales)
for i in range(batch_size):
pointed_scale = pointed_scales[i]
# 目盛りの総数に応じてメーターの種類を見つける
if pointed_scale["num_scales"] > TYPE_THRESHOLD:
reading = pointed_scale["pointed_scale"] * METER_CONFIG[0]["scale_interval_value"]
else:
reading = pointed_scale["pointed_scale"] * METER_CONFIG[1]["scale_interval_value"]
readings.append(reading)
return readingsメイン関数#
モデルとパラメーターを初期化#
OpenVINO を使用して推論を実行するためにドロップダウン・リストからデバイスを選択します
import ipywidgets as widgets
device = widgets.Dropdown(
options=core.available_devices + ["AUTO"],
value="AUTO",
description="Device:",
disabled=False,
)
deviceDropdown(description='Device:', index=1, options=('CPU', 'AUTO'), value='AUTO')検出ネットワークから検出されるメーターの数は、シナリオによって任意である可能性があります。つまり、セグメント化ネットワーク入力のバッチサイズは動的次元であり、静的次元に使用される正の数ではなく -1 または ov::Dimension() として指定する必要があります。この場合、メモリー消費を最適化するため、入力バッチサイズの下限および上限を指定できます。
img_file = f"{DATA_DIR}/{IMG_FILE_NAME}"
det_model_path = f"{MODEL_DIR}/meter_det_model/model.pdmodel"
det_model_shape = {
"image": [1, 3, 608, 608],
"im_shape": [1, 2],
"scale_factor": [1, 2],
}
seg_model_path = f"{MODEL_DIR}/meter_seg_model/model.pdmodel"
seg_model_shape = {"image": [ov.Dimension(1, 2), 3, 512, 512]}
erode_kernel = 4
score_threshold = 0.5
seg_batch_size = 2
input_shape = 608
# モデル・オブジェクトを初期化
detector = Model(det_model_path, det_model_shape, device.value)
segmenter = Model(seg_model_path, seg_model_shape, device.value)
# 元の入力写真を視覚化
image = cv2.imread(img_file)
rgb_image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
plt.imshow(rgb_image)<matplotlib.image.AxesImage at 0x7f2d2dd77130>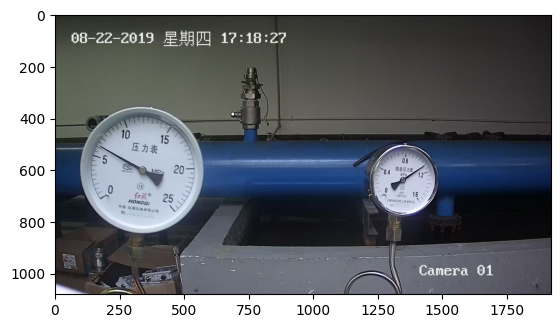
メーター検出モデルの実行#
メーターの位置を検出し、セグメント化用の ROI 画像を準備します。
# メーター検出モデルの入力データを準備
im_shape = np.array([[input_shape, input_shape]]).astype("float32")
scale_factor = np.array([[1, 2]]).astype("float32")
input_image = det_preprocess(image, input_shape)
inputs_dict = {"image": input_image, "im_shape": im_shape, "scale_factor": scale_factor}
# 走行メーター検出モデル
det_results = detector.predict(inputs_dict)
# 信頼性の低い境界ボックスを除外
filtered_results = filter_bboxes(det_results, score_threshold)
# メーターのセグメント化モデルの入力データを準備
scale_x = image.shape[1] / input_shape * 2
scale_y = image.shape[0] / input_shape
# 検出されたメーターごとに個別の画像を作成
roi_imgs, loc = roi_crop(image, filtered_results, scale_x, scale_y)
roi_imgs, resize_imgs = roi_process(roi_imgs, METER_SHAPE)
# 検出結果の画像を作成
roi_stack = np.hstack(resize_imgs)
if cv2.imwrite(f"{DATA_DIR}/detection_results.jpg", roi_stack):
print('The detection result image has been saved as "detection_results.jpg" in data')
plt.imshow(cv2.cvtColor(roi_stack, cv2.COLOR_BGR2RGB))The detection result image has been saved as "detection_results.jpg" in data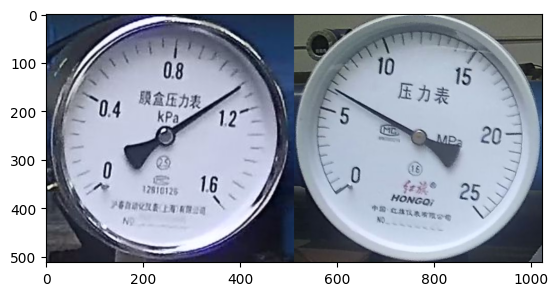
メーターセグメント化モデルの実行#
検出された ROI に対するセグメント化タスクの結果を取得します。
seg_results = list()
mask_list = list()
num_imgs = len(roi_imgs)
# 検出されたすべてのメーターに対してメーターセグメント化モデルを実行
for i in range(0, num_imgs, seg_batch_size):
batch = roi_imgs[i : min(num_imgs, i + seg_batch_size)]
seg_result = segmenter.predict({"image": np.array(batch)})
seg_results.extend(seg_result)
results = []
for i in range(len(seg_results)):
results.append(np.argmax(seg_results[i], axis=0))
seg_results = erode(results, erode_kernel)
# セグメント化結果の画像を作成
for i in range(len(seg_results)):
mask_list.append(segmentation_map_to_image(seg_results[i], COLORMAP))
mask_stack = np.hstack(mask_list)
if cv2.imwrite(f"{DATA_DIR}/segmentation_results.jpg", cv2.cvtColor(mask_stack, cv2.COLOR_RGB2BGR)):
print('The segmentation result image has been saved as "segmentation_results.jpg" in data')
plt.imshow(mask_stack)The segmentation result image has been saved as "segmentation_results.jpg" in data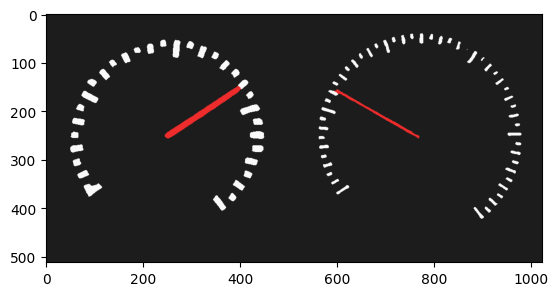
モデルの結果を後処理し最終的な読み取り値を計算#
OpenCV 関数を使用して、スケールマップ内のポインターの位置を見つけます。
# スケールマップでポインターの位置を見つけ、メーターの読み取り値を計算
rectangle_meters = circle_to_rectangle(seg_results)
line_scales, line_pointers = rectangle_to_line(rectangle_meters)
binaried_scales = mean_binarization(line_scales)
binaried_pointers = mean_binarization(line_pointers)
scale_locations = locate_scale(binaried_scales)
pointer_locations = locate_pointer(binaried_pointers)
pointed_scales = get_relative_location(scale_locations, pointer_locations)
meter_readings = calculate_reading(pointed_scales)
rectangle_list = list()
# 長方形のメートルをプロット
for i in range(len(rectangle_meters)):
rectangle_list.append(segmentation_map_to_image(rectangle_meters[i], COLORMAP))
rectangle_meters_stack = np.hstack(rectangle_list)
if cv2.imwrite(
f"{DATA_DIR}/rectangle_meters.jpg",
cv2.cvtColor(rectangle_meters_stack, cv2.COLOR_RGB2BGR),
):
print('The rectangle_meters result image has been saved as "rectangle_meters.jpg" in data')
plt.imshow(rectangle_meters_stack)The rectangle_meters result image has been saved as "rectangle_meters.jpg" in data
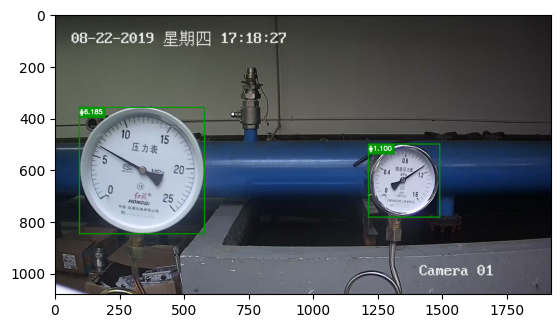
メーターの画像で読み取り結果を取得#
# 最終結果の写真を読み取り作成
for i in range(len(meter_readings)):
print("Meter {}: {:.3f}".format(i + 1, meter_readings[i]))
result_image = image.copy()
for i in range(len(loc)):
cv2.rectangle(result_image, (loc[i][0], loc[i][1]), (loc[i][2], loc[i][3]), (0, 150, 0), 3)
font = cv2.FONT_HERSHEY_SIMPLEX
cv2.rectangle(
result_image,
(loc[i][0], loc[i][1]),
(loc[i][0] + 100, loc[i][1] + 40),
(0, 150, 0),
-1,
)
cv2.putText(
result_image, "#{:.3f}".format(meter_readings[i]),
(loc[i][0], loc[i][1] + 25),
font,
0.8,
(255, 255, 255),
2,
cv2.LINE_AA,
)
if cv2.imwrite(f"{DATA_DIR}/reading_results.jpg", result_image):
print('The reading results image has been saved as "reading_results.jpg" in data')
plt.imshow(cv2.cvtColor(result_image, cv2.COLOR_BGR2RGB))Meter 1: 1.100
Meter 2: 6.185
The reading results image has been saved as "reading_results.jpg" in data