person-vehicle-bike-detection-crossroad-yolov3-1020¶
ユースケースと概要説明¶
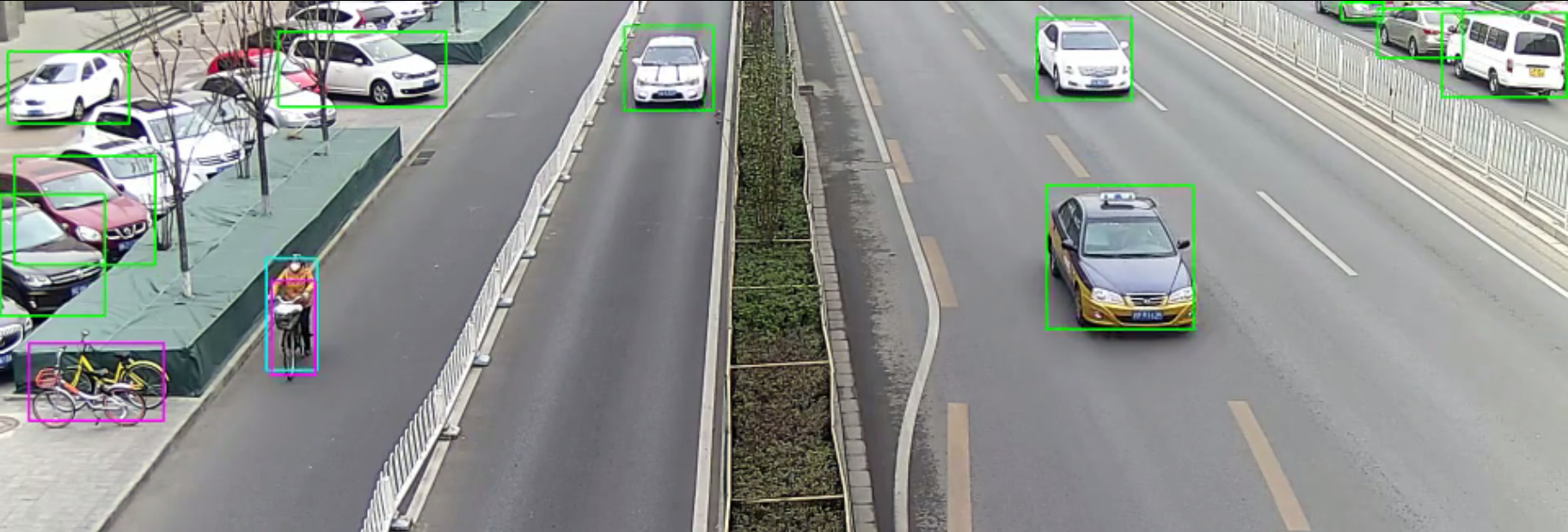
これは、セキュリティー監視アプリケーション向けに人/車両/自転車の検出用に微調整された YOLO V3 ネットワークです。さまざまなシーンや天候/照明条件で機能します。
Yolo V3 は、こちらのリポジトリーから Keras* を使用して実装され、TensorFlow* フレームワークに変換されたリアルタイム物体検出モデルです。
このモデルは、80 クラスの Common Objects in Context (COCO) データセットで事前トレーニングされ、人/車両/自転車の検出用に微調整されました。
例¶
仕様¶
メトリック |
値 |
|---|---|
評価指標 (mAP) |
48.89% |
AP 人物 |
58.94% |
AP 車両 |
62.05% |
AP 自転車/バイク |
25.66% |
GFlops |
65.98 |
MParams |
61.92 |
ソース・フレームワーク |
Keras* |
平均精度 (AP) は、精度/再現率曲線の下の領域として定義されます。
検証データセットは、さまざまなシーンからの 34757 枚の画像で構成されており、次のものが含まれます。
オブジェクトのタイプ |
境界ボックスの数 |
|---|---|
車両 |
229503 |
歩行者 |
240009 |
自転車/バイク |
62643 |
同様に、トレーニング・データセットには次のような 17084 枚の画像があります。
オブジェクトのタイプ |
境界ボックスの数 |
|---|---|
車両 |
121111 |
歩行者 |
119546 |
自転車/バイク |
30220 |
入力¶
画像、名前: image_input、形状: 1, 416, 416, 3、形式: B, H, W, C。
説明:
B- バッチサイズH- 画像の髙さW- 画像の幅C- チャネル数
予想される色の順序: BGR。
出力¶
検出概要情報の配列、名前:
conv2d_58/Conv2D/YoloRegion、形状:1, 255, 13, 13。anchor 値は、116,90, 156,198, 373,326です。検出概要情報の配列、名前:
conv2d_66/Conv2D/YoloRegion、形状:1, 255, 26, 26。anchor 値は、30,61, 62,45, 59,119です。検出概要情報の配列、名前:
conv2d_74/Conv2D/YoloRegion、形状:1, 255, 52, 52。anchor 値は、10,13, 16,30, 33,23です。
各配列の出力形式は B, N*85, Cx, Cy です。
説明:
B- バッチサイズCx、Cy- セル・インデックスN- セルの検出ボックスの数
検出ボックスの形式は、[x, y, h, w, box_score, class_no_1, …, class_no_80]。
説明:
(
x,y) - セルに対するボックスの中心の座標h、w- ボックスの生の高さと幅。指数関数を適用し、対応するアンカーで乗算して、絶対的な高さと幅の値を取得しますbox_score- [0, 1] 範囲の検出ボックスの信頼度class_no_1, …,class_no_80- [0, 1] 範囲のクラスの確率分布。信頼値box_scoreを乗算して、各クラスの信頼度を取得します
モデルは人/車両/自転車検出データセットに基づいて微調整されているため、次のクラスに対してゼロ以外のスコアが返されます。
人 - 最も高いスコア
車両以外 (自転車/バイク) - 2 番目のスコア
車両 - 3 番目のスコア
これら 3 つのクラスのインデックスは、元の Common Objects in Context (COCO) データセット内のクラス person、bike、および car のインデックスと一致していることに注意してください。また、このモデルは、元の Yolo V3 との下位互換性のため、80 個の COCO クラスすべてのクラススコアを返すことにも注意してください。
デモの使い方¶
Open Model Zoo が提供する次のデモでこのモデルを使用して、その機能を確認できます。
法務上の注意書き¶
* その他の社名、製品名などは、一般に各社の表示、商標または登録商標です。